
This page describes how Starnix translates Zircon exceptions and signals into Linux signals for unmodified Linux programs.
Motivation
Linux programs rely on signals for asynchronous notifications (for example,
SIGALRM, SIGCHLD) and error handling (such as SIGSEGV, SIGCHLD). Because
Starnix runs Linux programs in Zircon processes, it must bridge the gap between
Zircon's event model and Linux's signal model.
For more information on the motivation behind signal translation and the Starnix design philosophy, see As she is spoke.
Signal Flow
The lifecycle of a signal in Starnix can be grouped into three distinct phases:
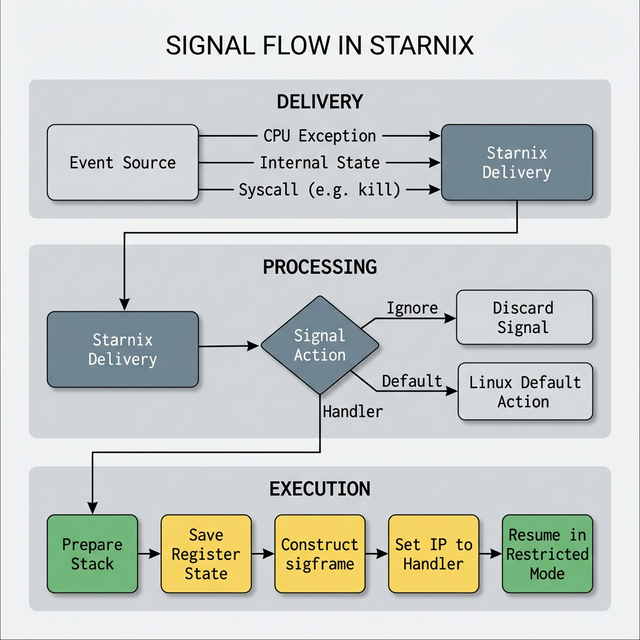
Delivery
Signal delivery in Starnix requires bridging Zircon's exception-handling mechanisms with Linux signal paradigms. Starnix intercepts events and ensures they reach the correct destination task as a Linux signal.
Delivery can be triggered from several distinct sources:
- Zircon Exceptions: The most complex path involves hardware faults. When a Linux thread executing in restricted mode triggers a CPU exception (such as a segmentation fault or a division by zero error), Zircon traps this violation and routes it back into the Starnix kernel via a restricted exit code.
- Internal State Transitions: Starnix continuously monitors the execution
environment. Internal components, such as the timer subsystem or process
management services, frequently trigger signals autonomously based on state
changes (for example, a timer expiration triggering a
SIGALRM, or a child process exiting triggering aSIGCHLD). - Syscalls: Tasks can explicitly request signal delivery to other processes
or thread groups by making direct system calls like
kill(2)ortgkill(2).
Processing
Once a signal is successfully delivered and appended to a task's pending queue, the kernel must determine what to do with it. This occurs during the processing phase, where Starnix evaluates the task's registered Signal Action.
Tasks define these actions during runtime using rt_sigaction(2).
Depending on the configuration, Starnix will execute one of three distinct
paths:
- Ignore: The signal is safely discarded without interrupting the thread's execution flow.
- Default Action: If no custom handler is defined, Starnix executes the Linux default resolution for that specific signal. This could mean silently terminating the process, generating a core dump for debugging, pausing execution, or simply continuing.
- Custom Handler: If the application has registered a specific function to handle the signal, Starnix must prepare the thread's user-space stack to safely interrupt the current workload and context-switch into the custom handler routine.
Execution
When a custom handler is required, Starnix does the following things:
- State Preservation: It first extracts and preserves the thread's current, interrupted register state and saves it onto the thread's user-space stack.
- Sigframe Construction: It then constructs a
sigframedata structure around this saved state on the stack. This frame holds all the necessary context to resume the thread later. - Redirection: With the backup saved, Starnix modifies the thread's instruction pointer, redirecting it to the memory address of the application's registered signal handler function.
- Resumption: Finally, Starnix yields control back to the thread, resuming execution in restricted mode. The thread "wakes up" inside the handler.
Related Syscalls
The following syscalls are the primary interfaces used by tasks to configure and trigger the signal flow described above:
rt_sigaction(2)
Tasks use this syscall to register custom actions for specific signals. Starnix
maintains this mapping within the Task structure, evaluating it during the
Processing phase to determine whether a signal should be
ignored, default-handled, or routed to a user-space execution handler.
rt_sigreturn(2)
When a user-space signal handler finishes executing, it calls
rt_sigreturn. Starnix uses this signal to conclude the
Execution phase. It reads the sigframe previously pushed onto
the stack, restores the thread's original interrupted state, and seamlessly
resumes normal operation.
kill(2)
This syscall allows tasks to proactively send signals to other processes. Starnix validates the necessary permissions and acts as the event source for the Delivery phase, appending the requested signal to the target process's pending signal queue.