
Introduction
The term platform bus refers to a specific Fuchsia driver with source code located at //fuchsia/src/devices/bus/drivers/platform/. However this term also refers to the framework that manages the lower level drivers in Fuchsia. In this document, platform bus driver refers to a specific driver and platform bus refers to the general framework.
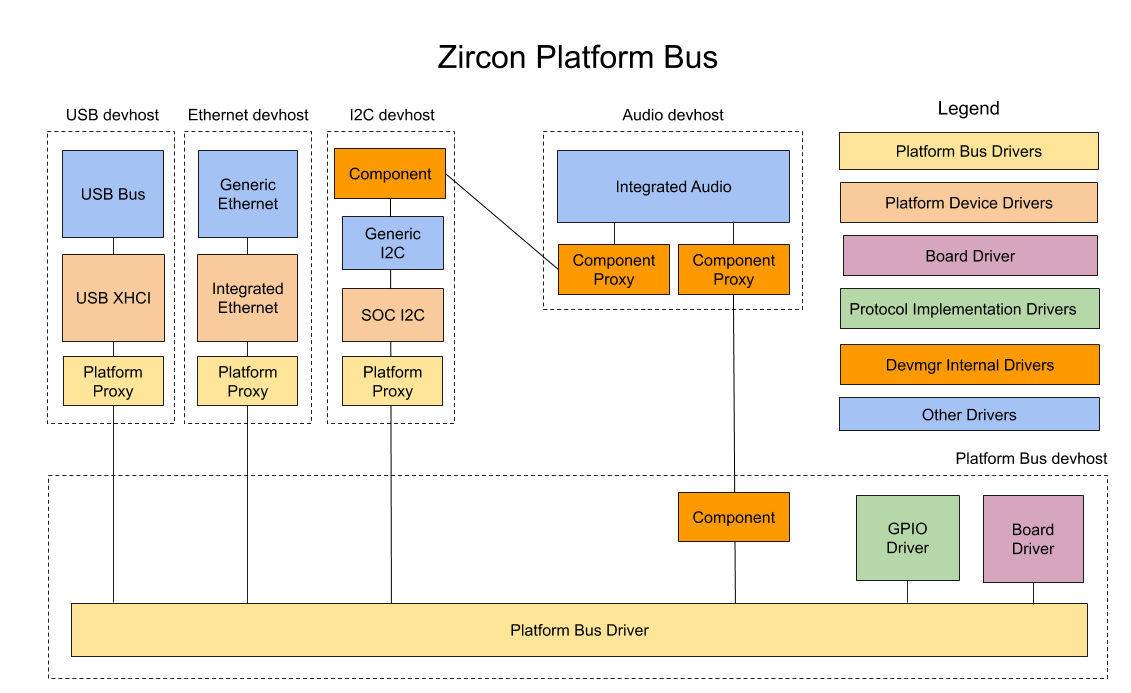
The platform bus as a whole contains several types of drivers:
The platform bus driver, which manages the platform bus. This is a generic driver with no hardware specific functionality. The platform bus driver is started automatically by the driver manager when the system boots.
The board driver, which is the first driver loaded by the platform bus driver. The board driver contains all the platform specific information needed by the platform bus and controls what other drivers will be loaded by the platform bus. On arm64 platforms, the platform bus driver uses information from the bootloader or boot shim to bind the correct board driver for the platform it is running on. On x86 platforms, the platform bus driver always loads the x86 board driver and creates platform devices based on information from ACPI.
The platform device drivers are the foundations for the higher level drivers in Fuchsia. These drivers provide the lowest level of support for a particular feature, like USB, eMMC or NAND storage, etc., with higher level drivers loading on top of that.
The protocol implementation drivers are drivers that provide protocols that are needed by the board driver. One common example of this is the GPIO driver, which is often needed by the board driver for pin-muxing. In the past, the platform bus used to also proxy these drivers' protocols to platform devices, but now we use composite devices instead. Over time, we will likely phase out the use of protocol implementation drivers in the platform bus and replace it with a new approach that does not require blocking to wait for drivers to load.
Finally, the platform proxy driver a companion to the platform bus driver that loads into the platform device driver hosts. This driver supports proxying the platform device protocol and other resource protocols from the platform device driver to the platform bus driver and protocol implementation drivers. This is needed because the platform device drivers run in a different driver host process than the platform bus driver and the protocol implementation drivers.
Platform Bus Initialization
The platform bus driver is started automatically by the driver manager at boot.
Since the platform bus driver is a generic driver that contains no information about the
platform it is running on, it first loads the board driver, which handles platform specific logic.
To determine which board driver to load, platform bus driver reads the ZBI_TYPE_PLATFORM_ID
record from the ZBI data passed from the
bootloader. It then adds a device with protocol ZX_PROTOCOL_PBUS with the
BIND_PLATFORM_DEV_VID and BIND_PLATFORM_DEV_PID binding variables set to the vid and did
from the platform data record. The correct board driver will bind to this device and continue
the platform bus initialization process. On x86 platforms, the x86 board driver is loaded
automatically.
The board driver uses the platform bus protocol to communicate with the platform bus driver.
After it does its own initialization, the board driver then uses the ProtocolDeviceAdd()
call in the platform bus protocol to load protocol implementation drivers.
After the protocol implementation driver loads, it must register its protocol with the platform bus
driver by calling the platform bus RegisterProtocol() API.
ProtocolDeviceAdd() will block until the driver calls RegisterProtocol(), so the board driver
must call RegisterProtocol() from one of its own threads rather than a driver manager callback like
Bind().
After the protocol devices are added, the board driver will call the DeviceAdd() call
in the platform bus protocol to create platform devices, which will result in
platform device drivers loading each in its own driver host.
After the platform devices are created, the platform bus initialization is complete.
Composite Platform Devices
The platform bus also supports adding platform devices to be used as components in composite
devices. The platform bus CompositeDeviceAdd() call adds a composite device, with the zeroth
component being a platform device described by the provided PBusDev struct.
The binding rules for the remaining components are provided by the components parameter.
The primary_fragment is used to specify which driver host the composite device
should be created in. Specifying NULL will result in a new driver host being created for the
composite device, while a valid string equal to one of the fragment's names will add the composite
device to the driver host of one of the other fragments. Passing "pdev" is not allowed, since we
do not want the composite device to be added to the platform bus driver's driver host.
The internals of composite platform devices are a bit different than the non-composite case. Instead of using the platform proxy driver, the driver manager component and component proxy drivers proxy the platform device protocol instead. For example, in the diagram above we have a composite device for an audio driver with a platform device as its first component and an I2C channel as its second. The audio driver is started in a new driver host, and the driver manager component and component proxy drivers are responsible for proxying the PDEV and I2C protocols to the audio driver.
Platform Device Protocol
The platform device protocol
(ZX_PROTOCOL_PDEV) is the main protocol provided by the platform bus to
platform device drivers. This protocol provides access to resources like MMIO ranges, interrupts,
BTIs, and SMC ranges to the platform device driver. Rather than requesting MMIOs and interrupts by
physical addresses or IRQ numbers, these resource are requested by a zero-based index.
This allows us to have platform device drivers for particular IP that works across multiple
platforms, since the knowledge of the exact MMIO addresses and interrupt numbers do not need to be
known by the driver. Instead, the board driver configures the MMIO addresses and IRQ numbers in the
PbusDev struct passed with AddDevice().
The platform device protocol is also available to protocol implementation drivers. For example, a GPIO driver may use the platform device protocol to access its MMIO and interrupts. This allows protocol implementation drivers to be shared among different SOC variants, where the functionality may be identical but the MMIO addresses and interrupt numbers may be different.
Platform Bus Protocol
The platform bus protocol is used by board drivers and protocol implementation drivers to communicate with the platform bus driver. It is only available to drivers running in the platform bus's driver host (in particular, it is not accessible to platform device drivers). The purpose of this protocol is for the board driver to load protocol implementation drivers and to start platform device drivers. It is also used by protocol implementation drivers to register their protocols with the platform bus so their protocols can be made available to platform device drivers.